Лабораторная работа № 3. Три шара.
Постановка задачи:
Три шара массой 1 кг последовательно соединены пружинами с жесткостью 1 Н/м (рисунок 34). К последнему шару приложена сила, изменяющаяся по трапецеидальному закону. Определить траекторию движения шаров.
Примечание: В данной задаче считать начальную длину пружин равную 0, т.е. в начальный момент времени все массы находятся в одной точке.
Исходные данные:
Масса шаров 1 кг
Жесткость пружин 1 Н/м
Сила 1 H
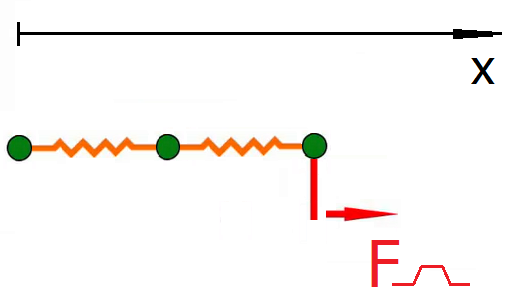
Рисунок 34. Три шара, соединенные пружинами
Решение задачи:
Открываем проект lab2 DINAMA\examples\labs\lab2 и загружаем пример threeBall1D.sch (рисунок 35).
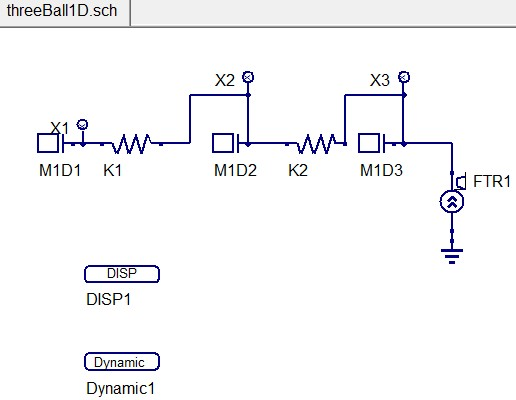
Рисунок 35. Схема threeBall1D.sch
На схеме M1D1, M1D2, M1D3 – шары, массой 1 кг, K1, K2 – жесткости, соединяющие шары, равные 1 Н/м, FTR1 – переменная сила с амплитудой 1 Н. начальное положение всех шаров равно 0, т.е все шары находятся в одной точке, X1, X2, X3 – индикаторы перемещений шаров M1D1, M1D2, M1D3 соответственно.
Запускаем моделирование (рисунок 36):
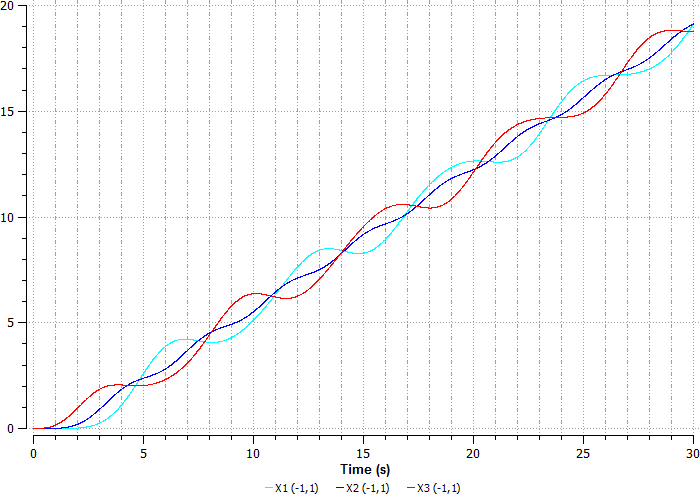
Рисунок 36. График перемещения шаров
На графике видно, что сила, приложенная к третьему шару, начинает его перемещать, затем начинает перемещаться второй шар, соединенный пружиной с третьим, а дальше перемещается первый шар, соединенный со вторым, и так далее.
Закрепим первый шар с помощью пружины K3 (рисунок 37), сохранив файл под названием threeBall1D_1.sch:
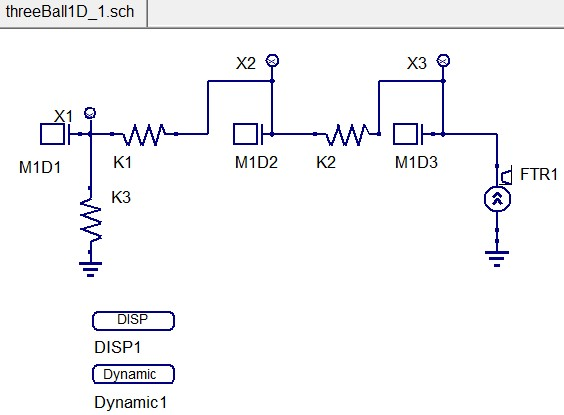
Рисунок 37. Закрепление первого шара с помощью пружины.
Так же для наглядности в свойствах компонента Dynamic1 изменим параметры end(Конечное время интегрирования), control() и smax() так, как показано на рисунке 38:
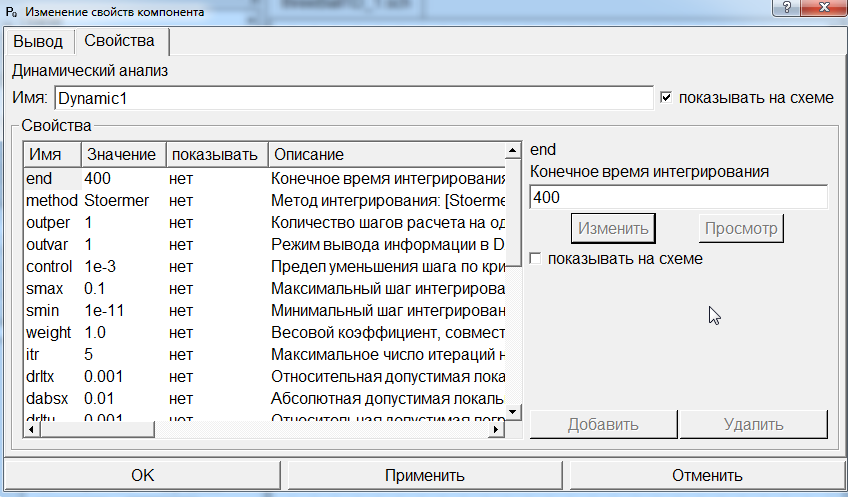
Рисунок 38. Изменение свойств компонента Dynamic1
Запустим моделирование (рисунок 39):
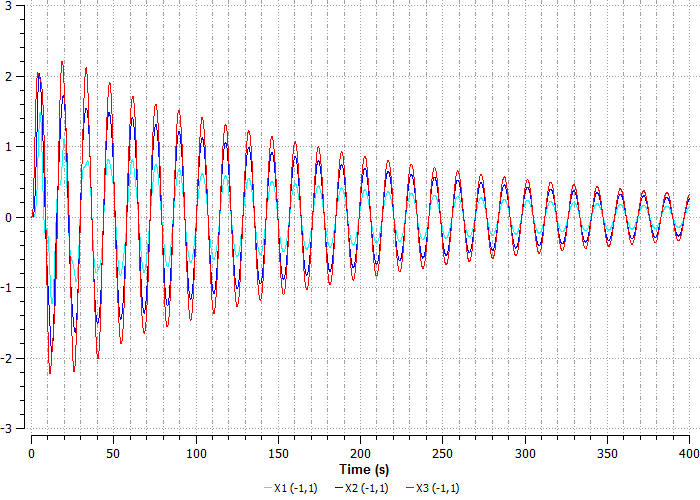
Рисунок 39. Перемещение шаров с новыми параметрами
Выделим участок от 0 до 50 секунд (рисунок 40), чтобы рассмотреть, как именно начинают двигаться шары:
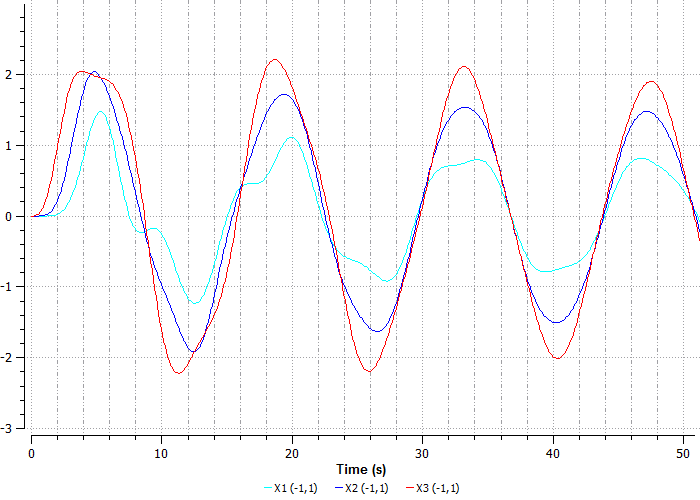
Рисунок 40. Перемещение шаров при Time = 50
Очевидно, что шары начали колебаться. Так же, как и до закрепления, под воздействием силы движение начинает третий шар, а затем тянет остальные за собой.
На первом графике (рисунок 39) видно, что амплитуда колебания со временем уменьшается.
Далее уберем силу, действующую на третий шар, и добавим начальное смещение шаров SN1, SN2 так, чтобы они находились друг от друга на расстоянии 1 м (рисунок 41). Сохраним файл под названием threeBall1D_2.sch.
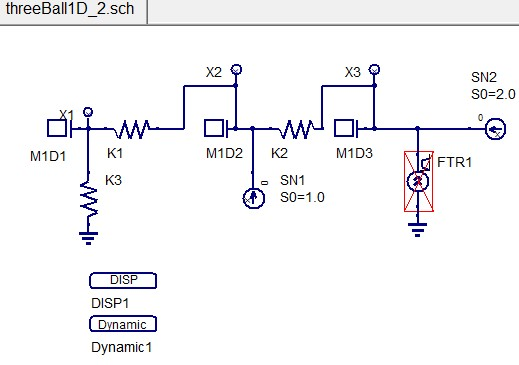
Рисунок 41. Добавление начального смещения первого и второго шара, деактивация силы, действующей на третий шар
Запустим моделирование (рисунок 42):
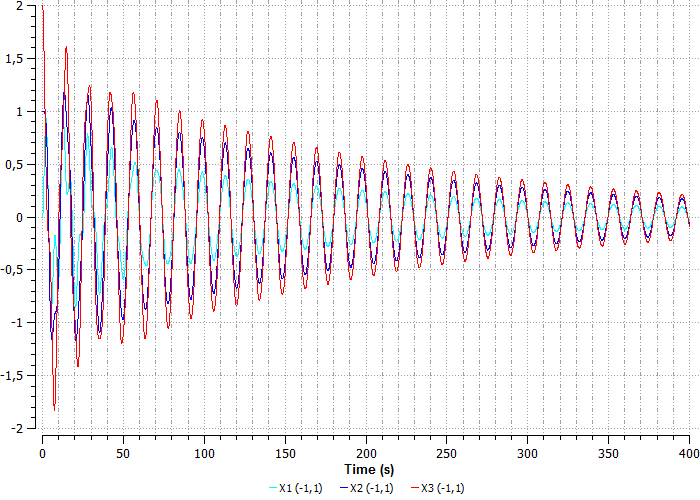
Рисунок 42. Перемещение шаров с новыми параметрами
Выделим участок от 0 до 50 секунд, чтобы рассмотреть, как именно начинают двигаться шары (рисунок 43):
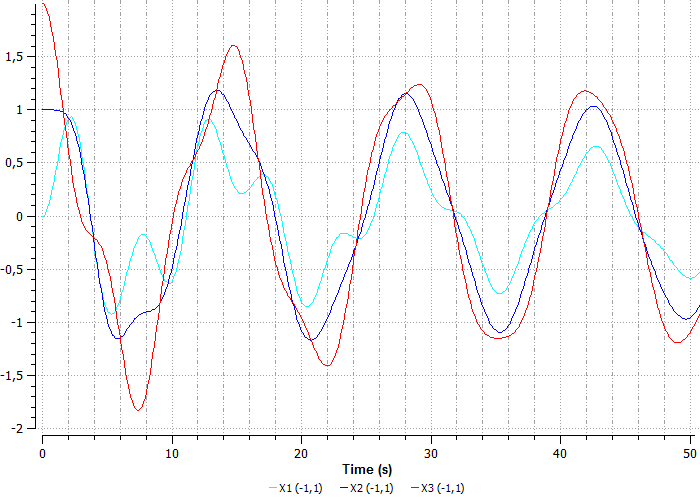
Рисунок 43. Перемещение шаров при Time = 50
На графике видно, что шары начинают колебания с разного начального положения, каждая пружина «сжимаясь» тянет шары за собой.
На первом графике (рисунок 42) видно, что амплитуда колебания со временем уменьшается из-за первого порядка метода интегрирования (метод Штермера).
Далее рассмотрим ситуацию, когда второй шар может двигаться только по направлению оси X. Для этого добавим в схему храповик HRP1 (рисунок 44). Сохраним файл под названием threeBall1D_3.sch:
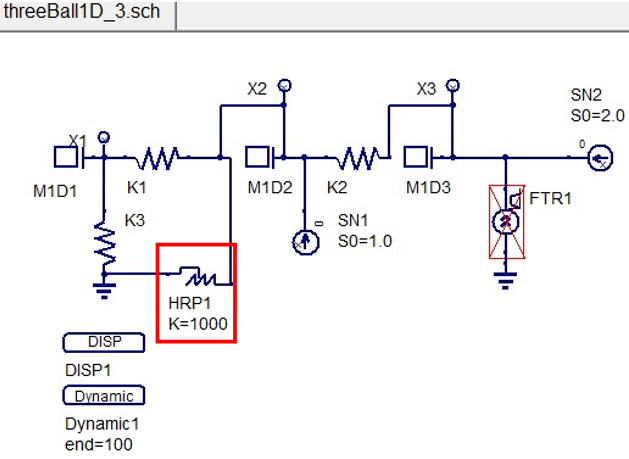
Рисунок 44. Добавление храповика
Запустим моделирование (рисунок 45):
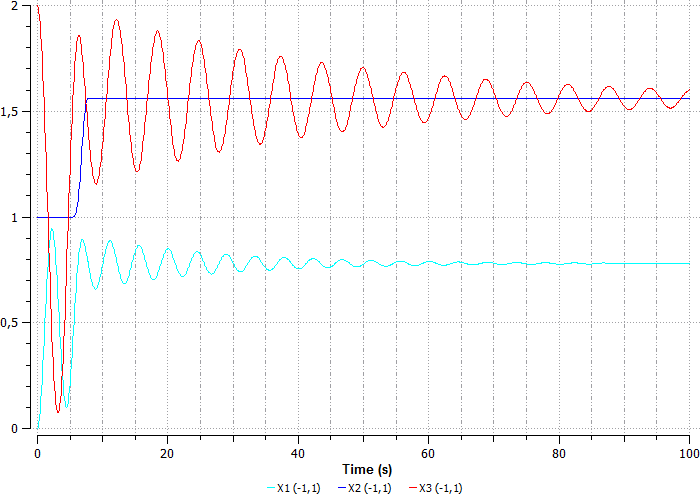
Рисунок 45. График перемещения шаров с добавлением храповика
Очевидно, что второй шар колебаться не будет. Пружина K1 растянется в тот момент, когда третий шар будет стремиться к исходному положению.