Лабораторная работа № 2. Шар.
Постановка задачи:
Шар массой 1 килограмм брошен горизонтально с высоты 1 метр с начальной скоростью 1 м/с (рисунок 23). Определить траекторию движения шара. Считать удар шара с землей абсолютно упругим.
Исходные данные:
Масса шара 1 кг
Высота 1 м
Начальная скорость 1 м/с
Жесткость удара 10000 Н/м
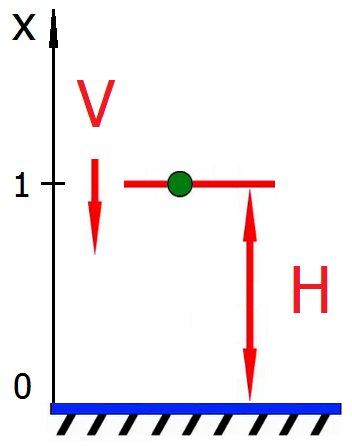
Рисунок 23. Шар
Решение задачи:
Открываем проект lab1 DINAMA\examples\labs\lab1 и загружаем пример ball1D.sch (рисунок 33).
Примечание: в данном примере изначально не задана сила тяжести.
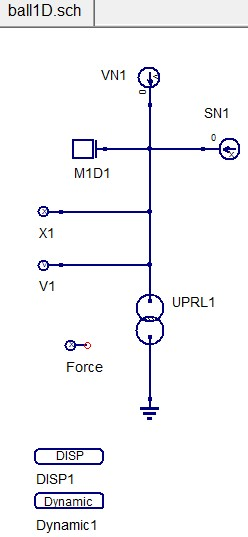
Рисунок 24. Схема ball1D.sch
На схеме M1D1 – шар массой 1 кг, VN1 – начальная скорость 1 м/с, SN1 – начальная высота 1 м, UPRL – одномерное упругое контактное взаимодействие между двумя телами (между шаром и землей), X1 – индикатор высоты шара, V1 – индикатор скорости.
Запускаем моделирование (рисунок 25):
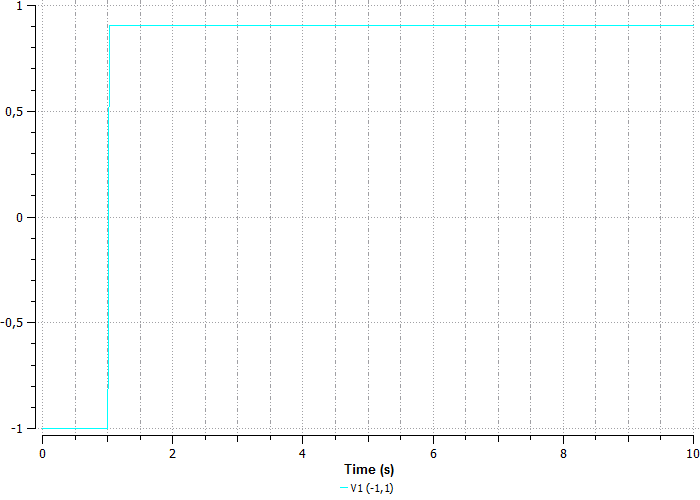
Рисунок 25. График скорости шара
На графике видно, что скорость не доходит до единицы, так как автоматически задана точность интегрирования первого порядка. Для получения более точных результатов изменим метод интегрирования в свойствах компонента Dynamic1 (рисунок 26). Поставим вместо Stoermer метод Newmark (точность интегрирования второго порядка), и сохраним файл под названием ball1D_1.sch.
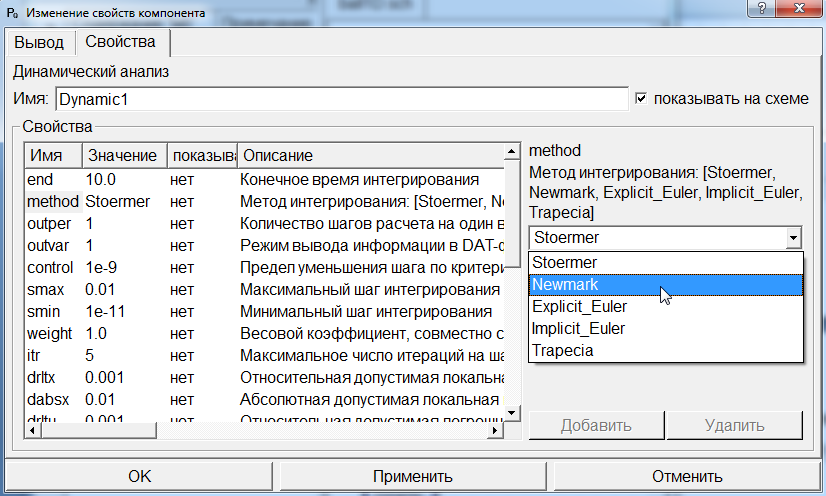
Рисунок 26. Изменение метода интегрирования
Запустим моделирование (рисунок 27):
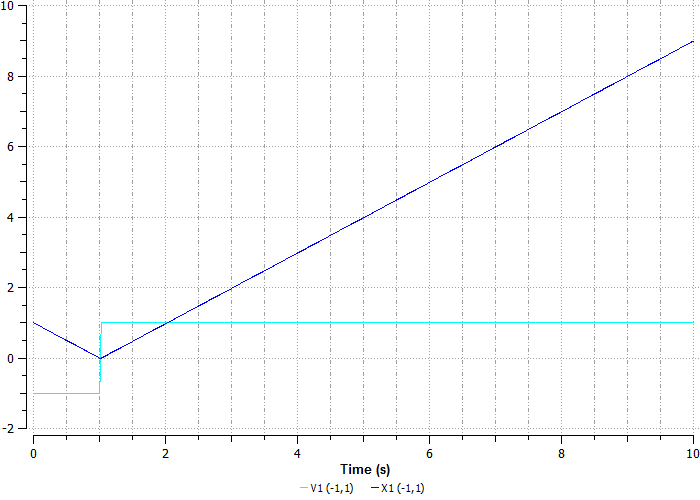
Рисунок 27. График скорости и перемещения шара
На графике видно, что шар ударяется о землю и летит вверх, при этом скорость в момент удара становится равна единице.
Далее добавим силу тяжести FG1 и уберем начальную скорость VN1 (рисунок 28), сохранив файл под названием ball1D_2.sch:
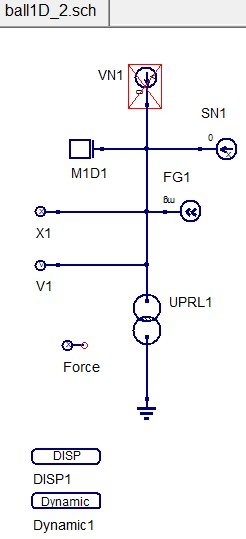
Рисунок 28. Добавление силы тяжести и деактивация начальной скорости
Запускаем моделирование (рисунок 29):
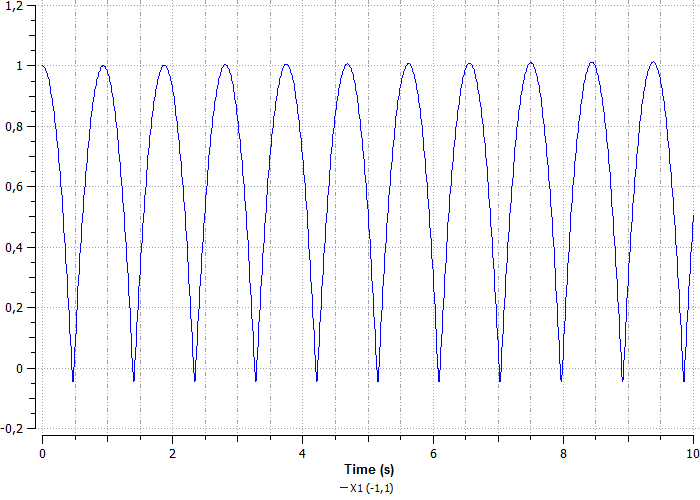
Рисунок 29. Перемещение шара с новыми параметрами
Так как учтена сила тяжести, но не учитывается потеря энергии при ударе, видно, что шар поднимается на начальную высоту.
Нужно учесть потери энергии при ударе шара о землю (рисунок 30). Добавим управляемую вязкость MUV1 таким образом: если центр тяжести шара ниже 0, то должно быть определенное значение вязкости, если больше 0, то вязкости не должно быть. Используем индикатор высоты Height.Также добавим мультиплексор Mux1, для определения высоты: если значение меньше 0, то значение вязкости приравниваем к Const1, если больше 0, то Const2. Для определения вязкости при высоте 0 добавим на схему сигнал VN2. Также добавим индикатор вязкости Damper. Сохраним файл под названием ball1D_3.sch:
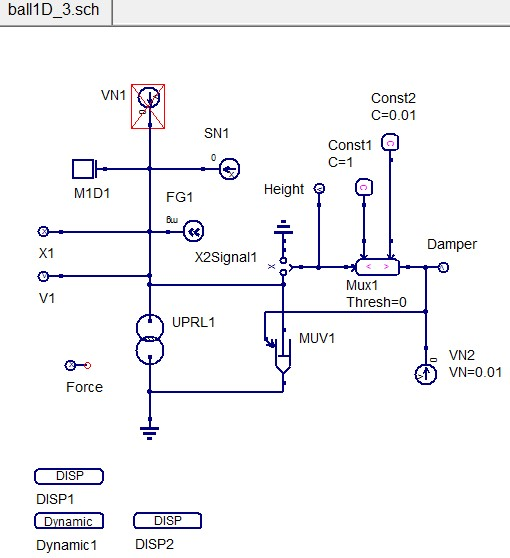
Рисунок 30. Учет потери энергии при ударе шара о землю
Параметры компонента DISP2 (рисунок 31):
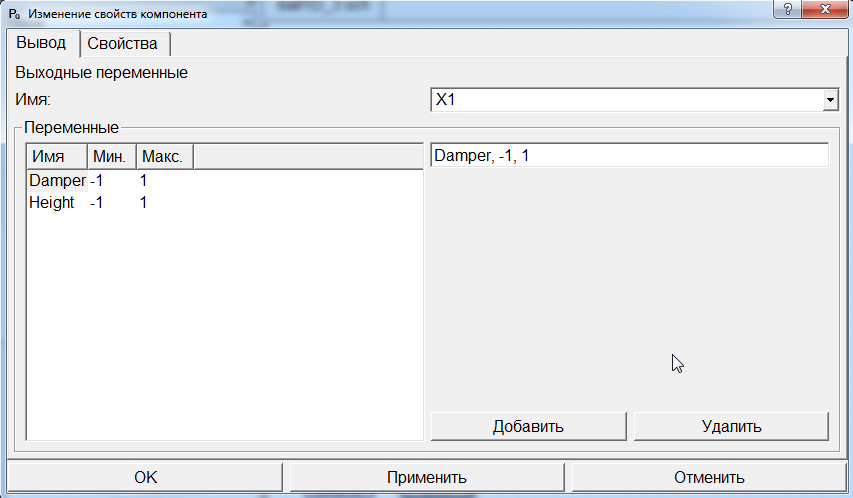
Рисунок 31. Параметры компонента DISP2
А также поменяем обратно метод интегрирования в свойствах компонента Dynamic1 (рисунок 32). Поставим Stoermer:
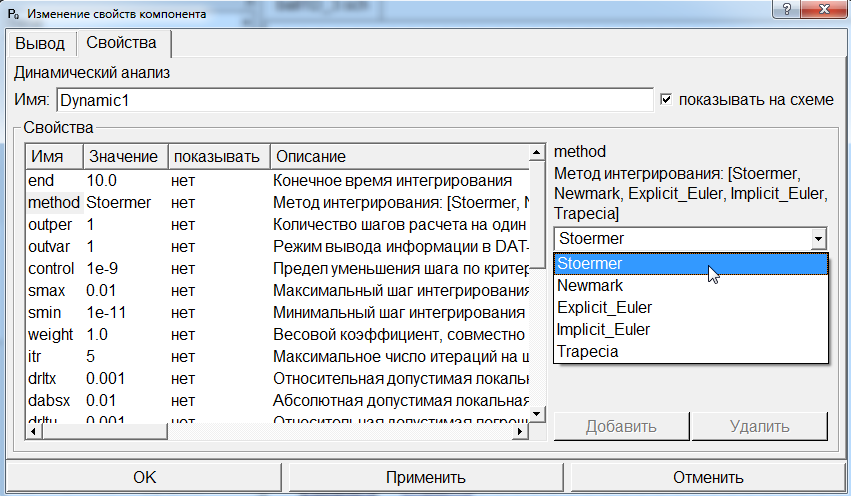
Рисунок 32. Изменение метода интегрирования
Запустим моделирование (рисунок 33):
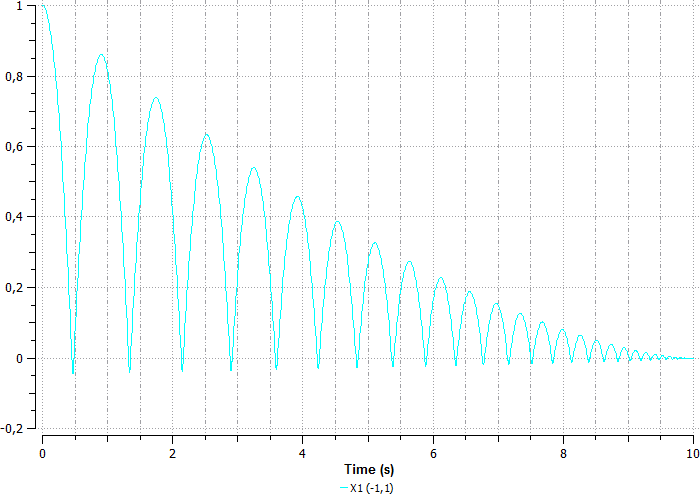
Рисунок 33. Перемещение шара с новыми параметрами
На графике перемещения видно, что шар после каждого удара о землю поднимается каждый раз ниже и ниже из-за потери энергии в вязкости.